LIBERO: Insegnare ai Robot a Non Dimenticare i Vecchi Trucchi
Immagina di aver insegnato a un robot manipolatore a posare con cura un libro su uno scaffale. Ottimo! Ora gli chiedi di mettere una tazza sul tavolo, e... dimentica completamente come gestire i libri. Situazione familiare nel mondo del machine learning? Questo fenomeno, noto come "oblio catastrofico", è uno dei principali grattacapi per i ricercatori in robotica. Un robot bravo in un solo task è quasi inutile nel mondo reale.
È esattamente per risolvere questo problema che è stato creato il progetto LIBERO (Lifelong-Robot-Learning). Non è solo codice, ma un intero framework e benchmark per sviluppare e testare robot capaci di "apprendimento continuo" — ovvero accumulare conoscenze e competenze senza perdere quelle esistenti. Scopriamo cos'è questa creatura e perché dovresti prestargli attenzione.

Cos'è LIBERO e chi ne ha bisogno?
Se lo mettiamo in parole semplici, LIBERO è una "palestra" e "arena d'esame" per l'intelligenza artificiale dei robot. Fornisce ai ricercatori e agli sviluppatori tutto il necessario per insegnare a un agente AI a eseguire più task in sequenza, trasferendo la conoscenza da uno all'altro.
Il progetto sarà particolarmente utile per:
- Ricercatori di AI/ML e robotica: LIBERO offre un set standardizzato di task e metriche per confrontare diversi approcci di apprendimento continuo.
- Studenti e dottorandi: È una sandbox pronta all'uso per imparare e sperimentare con concetti avanzati di apprendimento robotico.
- Ingegneri pratici: Chi vuole testare i propri algoritmi in condizioni realistiche dove il robot ha bisogno di adattarsi costantemente.
invece di creare ambienti e task da zero ogni volta, ottieni un toolkit pronto che ti permette di concentrarti su ciò che conta di più — gli algoritmi di apprendimento.
Funzionalità chiave: cosa c'è dentro?
LIBERO non è solo una collezione di script, ma una piattaforma completa. Ecco le sue componenti più interessanti.
1. Generatore infinito di task
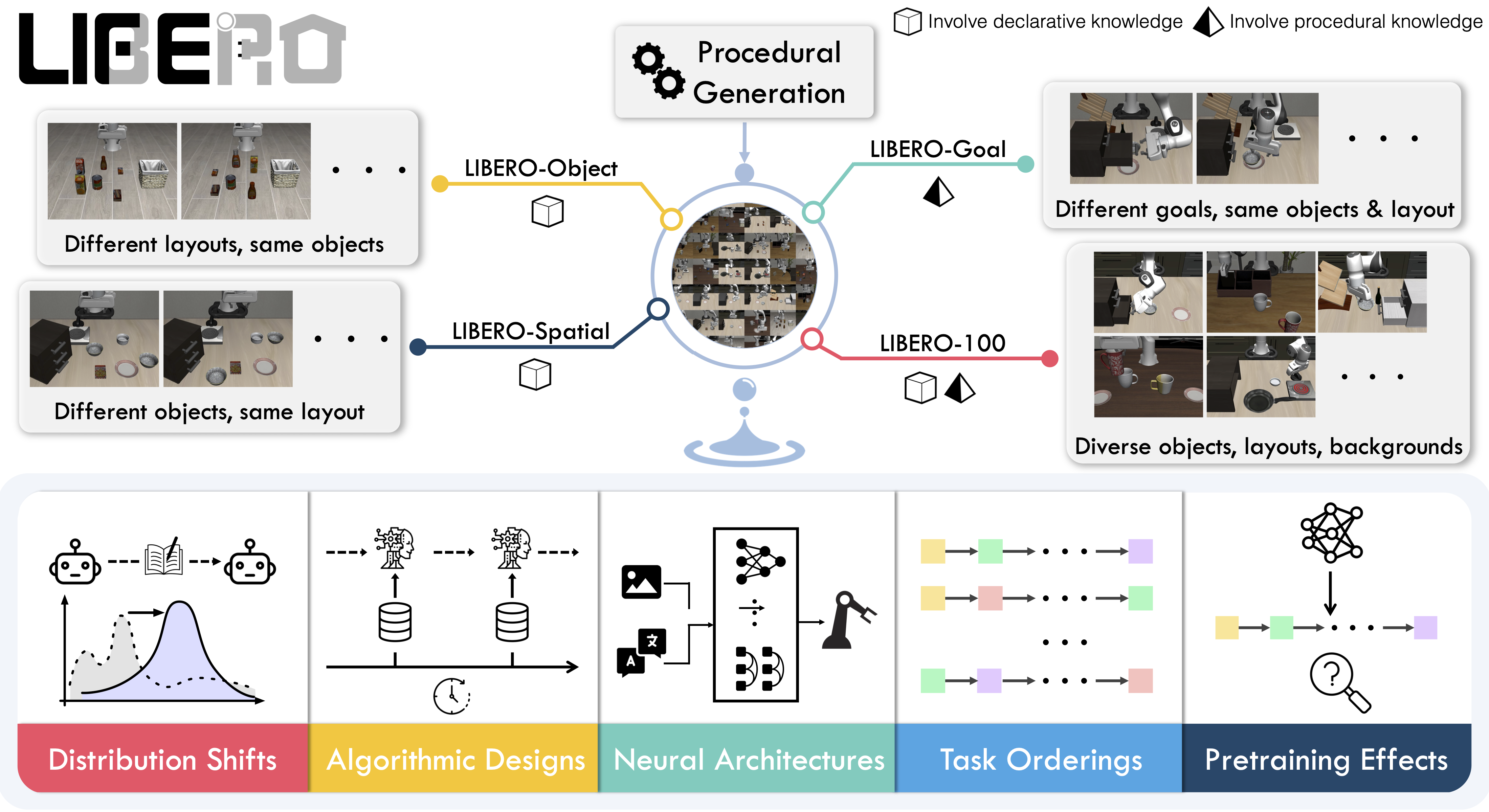
Uno dei punti di forza principali del progetto è la generazione procedurale dei task. Questo significa che, in teoria, LIBERO può creare un numero infinito di scenari di manipolazione unici. Questo risolve il problema della "memorizzazione del dataset": il modello non potrà semplicemente memorizzare le azioni corrette per un set limitato di esempi. Dovrà imparare a generalizzare.
2. Suite di task pronte all'uso
Per comodità, gli autori hanno raggruppato 130 task in quattro set tematici:
- LIBERO-Spatial: Task che richiedono la comprensione delle relazioni spaziali ("metti il cubo sopra la scatola", "spingi l'oggetto sotto il tavolo").
- LIBERO-Object: Si concentra sull'interazione con diversi oggetti. Qui il robot deve trasferire le competenze dal lavoro con un tipo di oggetto a un altro.
- LIBERO-Goal: Task dove l'obiettivo finale cambia mentre gli oggetti e l'ambiente rimangono gli stessi.
- LIBERO-100: Il set più impegnativo di 100 task diversificati che richiedono trasferimento misto di conoscenza. È ulteriormente diviso in
LIBERO-90per il pre-addestramento eLIBERO-10per il test finale della capacità di apprendimento continuo dell'agente.
Questa suddivisione permette di testare in modo mirato come un modello trasferisce tipi specifici di conoscenza — procedurale (come muoversi) o dichiarativa (cosa si trova dove).
3. "Batterie incluse": Algoritmi e architetture
Per facilitare l'avvio degli esperimenti, LIBERO include già algoritmi base e architetture di reti neurali:
- Tre architetture visuo-motorie:
bc_rnn_policy,bc_transformer_policy,bc_vilt_policy. Queste sono "cervelli" pronti all'uso per il robot che trasformano l'immagine della telecamera in azioni del manipolatore. - Cinque algoritmi di apprendimento: Inclusi approcci base (fine-tuning sequenziale, apprendimento multi-task) e metodi più avanzati per l'apprendimento continuo (
er,ewc,packnet).
Questo significa che puoi iniziare subito a confrontare diversi approcci senza perdere tempo a implementarli da zero.
Come funziona nella pratica?
Iniziare con LIBERO è piuttosto semplice. Dopo l'installazione standard tramite conda e pip, ottieni accesso all'intero toolkit.
Ad esempio, per scaricare i dataset con le dimostrazioni umane (sì, il progetto si concentra sull'imitation learning), basta eseguire uno script. A proposito, hanno recentemente aggiunto la possibilità di scaricarli direttamente da HuggingFace — molto comodo!
# Скачать все датасеты с HuggingFace
python benchmark_scripts/download_libero_datasets.py --use-huggingface
E ecco un esempio minimo di caricamento ed esecuzione di uno dei task:
from libero.libero import benchmark
from libero.libero.envs import OffScreenRenderEnv
# Получаем список доступных наборов задач
benchmark_dict = benchmark.get_benchmark_dict()
task_suite_name = "libero_10"
task_suite = benchmark_dict[task_suite_name]()
# Выбираем конкретную задачу по её ID
task_id = 0
task = task_suite.get_task(task_id)
task_description = task.language
print(f"Загружена задача: {task_description}")
# Инициализируем окружение для симуляции
env_args = {
"bddl_file_name": os.path.join(get_libero_path("bddl_files"), task.problem_folder, task.bddl_file),
"camera_heights": 128,
"camera_widths": 128
}
env = OffScreenRenderEnv(**env_args)
env.reset()
# Выполняем 10 шагов с пустым действием
for step in range(10):
obs, reward, done, info = env.step([0.] * 7)
env.close()
Come puoi vedere, l'API è piuttosto semplice e intuitiva. Puoi facilmente integrare i tuoi modelli e algoritmi in questa pipeline.
Conclusioni: Vale la pena provarlo?
Assolutamente sì, se il tuo lavoro o i tuoi studi sono anche solo marginalmente legati all'apprendimento robotico. LIBERO è uno strumento potente e ben documentato che risolve un problema reale in questo campo. Non insegna al robot al posto tuo, ma fornisce un ambiente eccellente per gli esperimenti.
A chi si adatta particolarmente LIBERO:
- Ricercatori: Per pubblicare risultati riproducibili e confrontabili.
- Appassionati: Per "sporcarsi le mani" con approcci all'avanguardia nella robotica.
- Insegnanti: Come piattaforma pratica per corsi di machine learning e robotica.
Il progetto è in fase di sviluppo attivo e i suoi autori hanno svolto un lavoro enorme creando uno standard unificato per una delle aree più complesse e interessanti dell'AI. Quindi, se vuoi insegnare a un robot non solo a posare tazze ma anche a non dimenticarsi dei libri, dai un'occhiata al GitHub del progetto. È un ottimo punto di partenza.